This month I bought and received a new Apple MacBook Pro (M2 Pro, 14-inch, 2023) with the aim of replacing my own Apple MacBook Pro 15-inch (Intel) 2015 model which I bought in 2016. The MacBook Pro 15 still does work, but the battery life is awful now (I could have it replaced, which I’ve done several times with laptops in the past), the internal fans barely work, and the rubber around the screen is disintegrating, so with a trip back to the Northern Hemisphere planned next month, I thought it was time for a replacement.
A year ago I was provided (on loan) a work-provided MacBook Pro 14 M1 Pro (see previous benchmarks) which I’ve been using a bit, so I knew mostly what to expect in terms of performance and from the laptop in general, but I was curious to compare the performance of the M2 Pro against the M1 Pro (and the old Intel machine).
It’s not going to be a completely fair apples-to-apples comparison, as the work-provided MacBook Pro 14 M1 Pro processor is the 10-core version which has two extra performance cores than the baseline did - having eight performance cores and two efficiency cores - and the M2 Pro I’ve just bought is the baseline model - with six performance cores and four efficiency cores - but it should provide a rough indication of what performance to expect.
The Xcode / Apple Clang compiler versions are also different: My MacBook Pro 15 (Intel) is still running quite an old MacOS version, with an older compiler which I don’t want to update, and while I did install Xcode 14.3 on the 2021 MacBook Pro M1 Pro (as well as the command line tools) in order to attempt to match what I’d just installed on my new 2023 MacBook Pro M2 Pro, clang --version still shows version 13.1.6, whereas my new 2023 M2 Pro MacBook Pro shows 14.0.3 being used, so I’m not really sure what’s going on there, as Xcode -> About Xcode shows Version 14.3.1 as I’d expect on both MacBook Pro 14 machines (and both have the command line tools for that version of Xcode installed).
The MacBook Pro 14s are both running MacOS Ventura 13.4.
Tests:
Copying what I did in the test last year, I’ll be using two of my apps as benchmarks: my Mint interpreter language VM (originally based off Robert Nystrom’s excellent Crafting Interpreters Lox language tutorial) but with additional functionality and performance improvements, which I’ll use to benchmark two Mint scripts as single-threaded tests, and also my Imagine pathtracing renderer, which has native SSE intrinsics support for Intel and native Neon intrinsics support for ARM, which I’ll run in both single- and multi-threaded scenarios.
Both apps will be compiled with -march=native on the Intel side and -mcpu=native on the Apple Silicon / ARM side, using the clang version on the machine in question, as well as optimisation level: -O3.
The two Mint script tests will be loop value calculation as Test 1:
var a = 1;
for (var i = 0; i < 100000000; i += 1)
{
a = (i + i + 3 * 2 + i + 1 - 0.42) / a;
}
print a;
and a variation of Project Euler 21 to calculate the sum of all Amicable numbers under 15,000 as Test 2.
The Imagine rendering tests will render three different scenes in both single- and multi-threaded mode.
The first render will be the same maze scene with spherical area lights that I used in the test last year (example image above), but with different settings:
resolution will be 256 x 256, 256 samples-per-pixel will be used, but this time only one next-event light sample will be taken each path vertex.
The general ray traversal and ray intersection will utilise SIMD, but the (fairly expensive) perfect light sphere sampling is scalar, and very unlikely
to be vectorised by the compilers themselves.
The second render will be a 450 x 338 resolution render of a Signed Distance Field primitive of a Julia Fractal (example image above, although with different settings), which is quite expensive to evaluate,
and also does not have any SIMD utilisation for the SDF evaluation / intersection. There’s a physical Sky IBL in the scene as a light, and 144 samples-per-pixel will be used, with 3x3 Blackman Harris pixel filtering being used.
The third render will be a 450 x 338 resolution render of 2,326,299 instanced mesh cubes in the (pre-calculated) shape of a Julia Fractal, which will
fully-utilise SIMD instructions for ray traversal in the BVH and for ray / primitive intersections. Again, there’s a physical Sky IBL in the scene,
144 samples-per-pixel will be used, but this time no pixel reconstruction filtering will be used (so effectively Box 1x1).
These tests will all be done on (close to fully-charged) battery power - I discovered in the tests last year that Apple doesn’t seem to down-clock on battery power - and I will also wait between test runs for the processor temperatures to be below 50 degC before running the next test, to try and reduce the impact of thermal throttling.
All tests will be run three times, and results below will show the mean average of those numbers.
Results
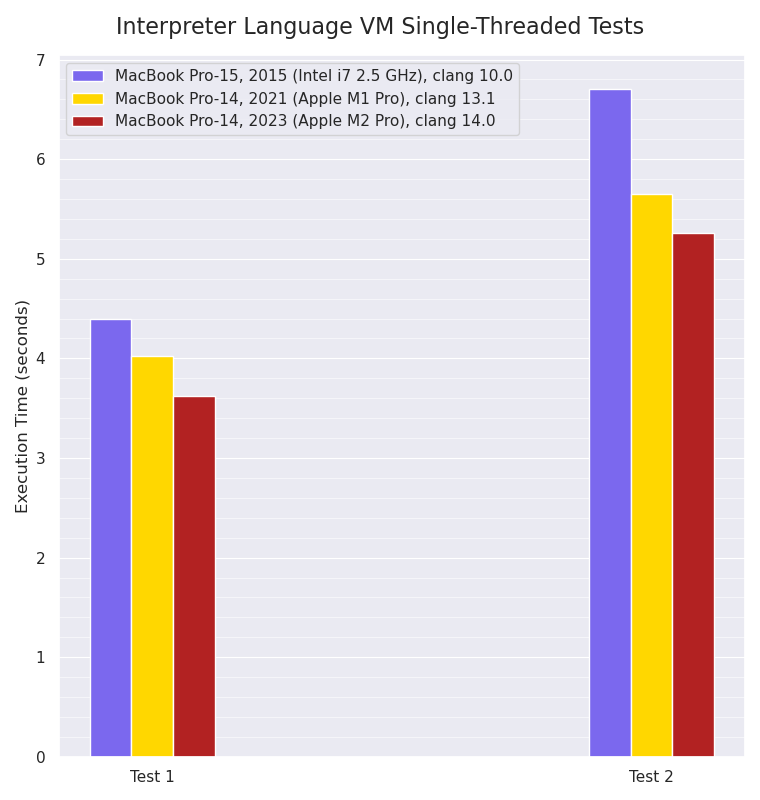
Single-threaded Mint VM interpreter:
Single-threaded Mint interpreter VM benchmarks, smaller values are better:
For these single-threaded tests, the M2 Pro has a small improvement over the M1 Pro’s performance, which itself is around 10-16% faster than the eight year old Intel i7 processor. As mentioned last year however, I think this is very likely because the Mint VM execution is often branch-prediction constrained within the main VM bytecode interpreter loop, so there’s a limit to the amount of Instruction-Level Parallelism that’s achievable from the eight-wide M1 Pro and M2 Pro.
Single-threaded Imagine rendering:
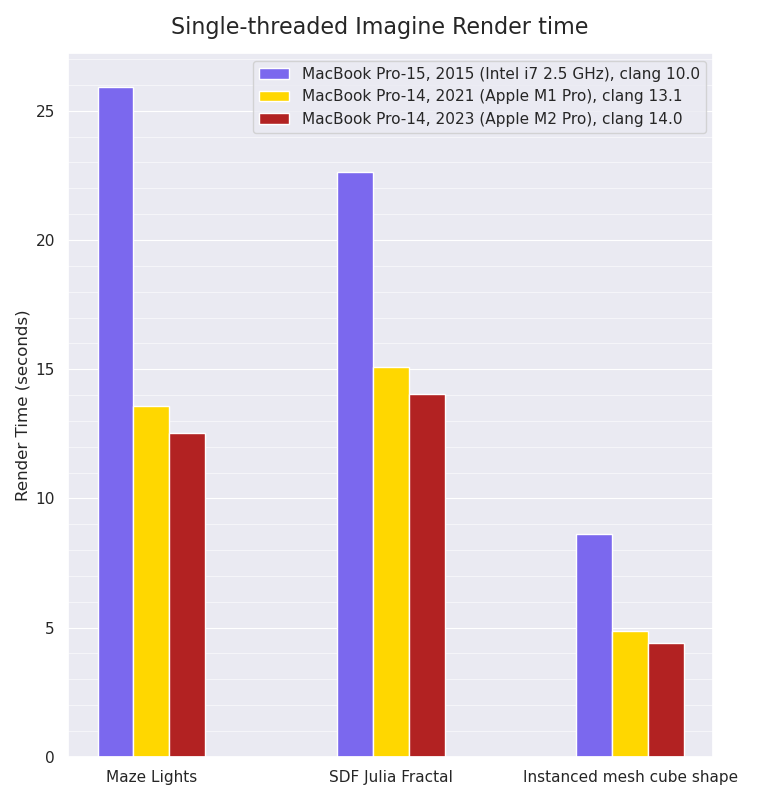
Single-threaded Imagine rendering benchmarks, smaller values are better:
The single-threaded rendering tests, which have a lot more floating point calculations and SIMD usage, show a small performance improvement for the M2 Pro over the M1 Pro. Intriguingly, the Maze Lights scene is the test with the biggest performance increase (almost 2x faster) from the Intel machine to the Apple M1 Pro: the other tests show slightly smaller gains, which I wouldn’t have expected. Without further microbenchmarks of various isolated parts of those tests, it’s difficult to guess why that might be, but the different render tests do exercise different calculations and code paths.
Multi-threaded Imagine rendering:
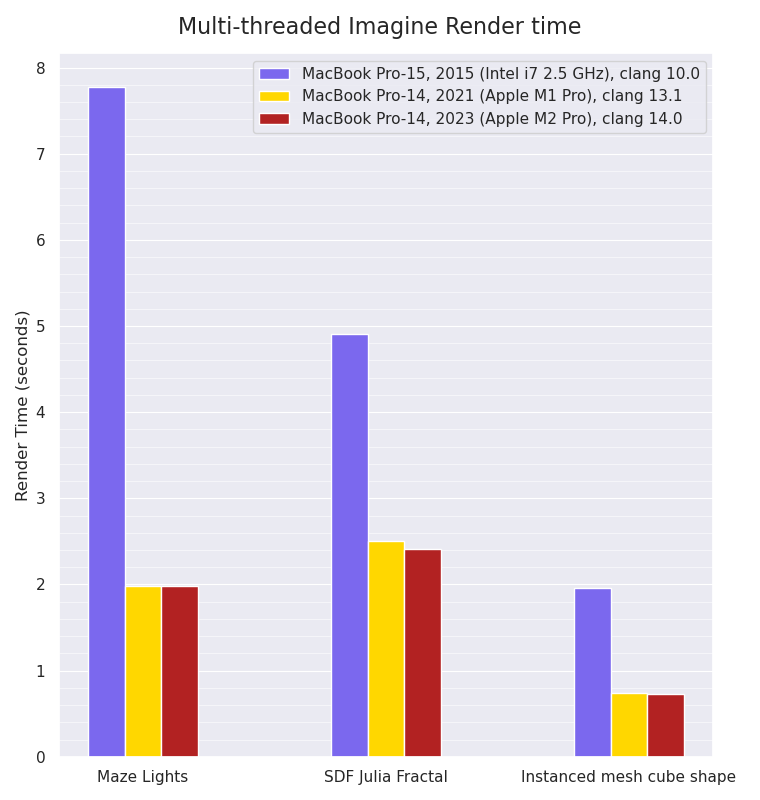
Multi-threaded Imagine rendering benchmarks, smaller values are better:
The multi-threaded rendering tests show that due to the fact the M1 Pro machine has eight performance cores and two efficiency cores, whilst the M2 Pro
machine only has six performance cores and four efficiency cores, the M2 Pro machine is only very slightly faster in the SDF Julia Fractal render scene than the M1 Pro machine, and ties in the other two tests. Once again, the Maze Lights scene shows the biggest performance increase - almost 4x faster - from the Intel CPU to the Apple Silicon ones, with the other two tests showing a less dramatic difference (between 2x to 3x faster).
Conclusion
I think a not too bad showing for the baseline model: the M2 Pro can beat the M1 Pro by a small margin in all single-threaded tests, and can either just about equal or slightly beat the M1 Pro which has more performance cores (but two less efficiency cores) in the multi-threaded tests.
Last week I received a work-provided (on loan) new Apple MacBook Pro (14-inch, 2021) with the Apple M1 Pro 10-core processor, so I was very curious to see how it performed with some of my code, given the generally excellent reviews and reports I’d seen by people with it online.
I have my own MacBook Pro 15-inch 2015 (Intel i7) model which I’ll be comparing it against as a basic benchmark performance test, although it won’t be a completely fair test as the two machines are running different versions of MacOS and the clang compiler, and I didn’t want to upgrade my own machine’s MacOS version to a newer version (for various reasons). So the code being executed on the different machines will be generated by different versions of clang, but given the micro-architecture is totally different anyway, I think it’s still a meaningful test and at least will show the performance difference between the two laptops.
My old MacBook Pro 15-inch 2015 is a 2.5 GHz Intel Core i7, with four cores, eight threads, and 1600 Mhz DDR3 memory, running macOS 10.14.5 (Mojave), with Xcode 10.2.1 installed which has clang version 10.0.1.
The new MacBook Pro 14-inch 2021 is the M1 Pro 10-core version, with 8 performance cores and 2 efficiency cores, running macOS 12.3 (Monterey), with Xcode 13.4.1 installed which has clang version 13.1.6.
Tests:
I’ll be using two of my apps as benchmarks: my Mint interpreter language VM (originally based off Robert Nystrom’s excellent Crafting Interpreters Lox language tutorial) but with additional functionality and performance improvements, which I’ll use to benchmark two Mint scripts as single-threaded tests, and also my Imagine pathtracing renderer, which has native SSE intrinsics support for Intel and native Neon intrinsics support for ARM, which I’ll run in both single- and multi-threaded scenarios.
Both apps will be compiled with -march=native on the Intel side and -mcpu=native on the Apple M1 Pro ARM side, using the clang version on the machine in question, as well as optimisation level: -O3.
The two Mint script tests will be loop value calculation as Test 1:
var a = 1;
for (var i = 0; i < 100000000; i += 1)
{
a = (i + i + 3 * 2 + i + 1 - 0.42) / a;
}
print a;
and a variation of Project Euler 21 to calculate the sum of all Amicable numbers under 15,000 as Test 2.
The Imagine rendering tests will render the below example scene of a basic maze with 12 spherical area lights and one hemisphere light, with four Next Event Estimation samples being taken each bounce to evaluate the lighting, and using Cone sampling to perfectly sample each spherical area light from each hitpoint, with 256 samples-per-pixel being done, using stratified sampling and a ray depth of 6 diffuse bounces. Depending on the setup of the tests (single-threaded, multi-threaded, etc), I’ll render the scene at resolutions of: 150 x 150, 300 x 300 and 600 x 600.
For all tests, I’ll run them on battery power and then mains power, in case that affects the clocking of the processors, and will also wait between test runs for the processor temperatures to be below 50 degC before running the next test, to try and reduce the impact of thermal throttling. However, for the longer-running multi-threaded Imagine rendering tests I’m fairly sure thermal throttling will start to take place on the Intel 2015 machine given how fast the fans start to spin in longer-running scenarios.
All tests will be run three times, and results below will show the mean average of those numbers.
Results
Single-threaded Mint VM interpreter:
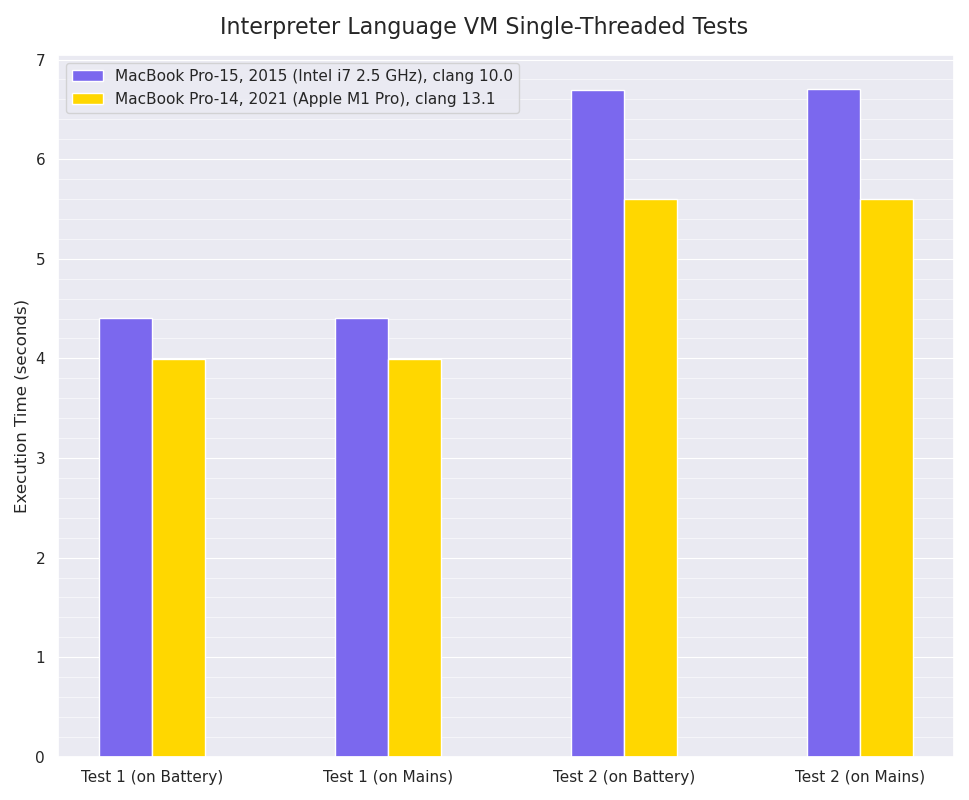
Single-threaded Mint interpreter VM benchmarks, smaller values are better:
For these single-threaded tests, the M1 Pro has fairly modest (~11% faster in Test 1, ~16% faster in Test 2) improvements over the seven year old Intel i7, however as the Mint VM execution is often branch-prediction constrained within the main VM bytecode interpreter loop, I expect this doesn’t really allow the M1 Pro’s eight-wide design to really stretch its legs running these benchmarks, as there’s a limit to the amount of Instruction-Level Parallelism that’s achievable.
It’s interesting to see that there’s no apparent difference in performance between running on battery vs running connected to the mains: I was expecting to see a difference - even if only on the Intel i7 MBP - as I know my Thinkpad T480s running Linux shows significant performance differences between the two states, but Apple clearly don’t seem to be implementing that strategy.
Single-threaded Imagine rendering:
Single-threaded Imagine rendering benchmarks, smaller values are better:
Things start to look more impressive for the M1 Pro in the single-threaded rendering tests, as here there are a lot more floating point calculations being done with a lot less branching, and there’s a fair amount of SIMD use (i.e. ray intersection / traversal code, which uses native SSE or Neon instructions for the respective platform architectures) allowing the M1 Pro to show what it can do.
For both the 150 x 150 resolution and 300 x 300 resolution renders, the M1 Pro machine completed the tasks in ~46% less time, so it’s close to twice as fast as the older Intel machine. Again, there was no apparent performance difference between running powered off the battery compared to running with the machines plugged into the mains power.
Multi-threaded Imagine rendering:
Multi-threaded Imagine rendering benchmarks, smaller values are better:
The multi-threaded rendering tests show that for the shorter-duration 300 x 300 resolution render, the M1 Pro was more than three times faster (render time was less than a 1/3 of the Intel MBP’s i7 render time), and for the longer-duration 600 x 600 resolution render this ratio was slightly better still - I suspect because of the fact the Apple M1 Pro has significantly better thermal performance than the Intel i7, so is not throttling as much - if at all - although watching the temps on the M1 Pro machine towards the end of the test shows it did reach 84 degC, so it’s possible throttling is happening a bit.
Conclusion
So for most code that’s likely not branch/dependency-bound, it would seem the almost one year-old M1 Pro being tested here is around three times faster than the seven year-old Intel i7 model (although the base M1 Pro model with two less performance cores will not be as fast), and for multi-threaded code that parallelises well it can be more than three times faster, with much better thermal performance (which means less fan noise) and battery life, which is exactly what you’d want from a laptop, and I think shows that the Apple M1 processors are something to be excited about.
I’ve sporadically but progressively been continuing to work on my Mint interpreter programming language/VM that was heavily based off Robert Nystrom’s excellent Crafting Interpreters Lox language tutorial, and have spent a fair bit of time trying to optimise the main VM bytecode despatch loop among other areas of the VM, as well as performing some benchmark comparisons with other similar bytecode VM interpreter languages like Lua, Python and Ruby to see where Mint stands performance-wise as well as to understand how fast the other VMs are, how they work and some of their performance characteristics for different things.
I managed to speed up the original HashMap implementation a bit by caching the capacity mod bit-mask and the capacity and table load ratio, so as to not recalculate them on-the-fly every lookup which wasn’t needed, and to only update them when the table resized, in addition to adding some compiler hints in order to force inline things and give hints on branch prediction likelihood which helped a bit more.
One of the main bottlenecks in raw execution speed is the main VM stack in terms of operations pushing and popping items onto and off it, so this is really the hot loop of the VM - at least when the Garbage Collector is not being exercised.
On the bytecode opcode execution side of things, I added some new opcodes in order to do some things more efficiently, for example to operate directly on items within the stack in certain limited scenarios when constant values are used, without having to pop and push them back - for example this can be used by compound assignment operators like +=, -=, *=, etc, with constant values being used as the right-hand-side argument, and helped speed things up a bit.
For general for loops incrementing a value by 1 each time, the push/pop overhead was fairly substantial, and I added a dedicated OP_INC_LOCAL opcode to help with this, which can increment the top of the stack by one without popping the stack and then having to push the result after adding 1. The compiler part can detect when this can be used (e.g. in the for loop increment clause, with a constant value being used as the increment) and will use it when possible.
Lua - being a register-based interpreter VM - seems to have an advantage in the area of performance - especially in maths-heavy code - because it doesn’t need to do as many stack operations, and this is one of the reasons Lua is one of the faster bytecode interpreter languages.
The main dispatch loop can also be optimised by using “computed gotos” instead of just a case statement for each opcode within a switch statement: with switch / case statements, compilers are obliged (in C and C++ anyway) to add an upper bound value check, which slows down execution.
In terms of where things stand now performance-wise, I’m fairly happy: Mint is not the fastest interpreter language VM, but it is very competitive against Python 2, Python 3 and Ruby in most cases, and occasionally can win against Lua.
For performance comparisons, I’ve mostly been using basic problem solving exercises from Project Euler which are normally maths-heavy, meaning the benchmark test programs I’m using are slightly skewed benchmarks towards maths operations compared to more general operations (i.e. they don’t generally exercise the Garbage Collector infrastructure), but that’s the type of code execution I’m mostly interested in for the moment.
I’m going to compare Mint against four (I’ll compare Python 2 and Python 3 separately) other interpreter language VMs:
Lua 5.3
Python 2.7
Python 3.8
Ruby 2.7
These are the package versions available with the Linux distro I’m using (Linux Mint) on my laptop, and I’m going to compare them against Mint (VM) built with GCC 9.3, as that’s the system compiler version that I assume the packages for the other interpreter language VMs were compiled with, so seems the fairest compiler to use to compile with. Mint will be built with optimisation level -O3. Normally I like also comparing different compiler versions and optimisation levels, but I’m not going to do that this time as my aim is to compare against other interpreter VMs, and that would increase the number of tests I’d have to do quite a lot, and I’d rather not get into building each one from source, but that would be the fairest way of doing a fully-comprehensive comparison if I had the time.
The tests are being done on a laptop with an Intel i5-8350U processor, with the power plugged in. I’ll make sure the CPU temp is normal before running each test to prevent thermal throttling, and will run five identical tests of each benchmark with each interpreter language, using the mean average as the final result.
I will run the following seven tests:
Test
Description
Test 1
Recursive Fibonacci to 35 levels.
Test 2
The Leibniz algorithm to calculate an approximate value of PI, doing 4,000,000 iterations.
Test 3
Loop value accumulation and mathematical operations: 100,000,000 loops of adding the result of temporary sums and multiplications of the loop control variable. See code examples below.
Test 4
Looped sum of multiples of 3 or 5, up to a value of 50,000,000. A modification of Project Euler exercise 1.
Test 5
A sum of all amicable numbers below 15,000. A modification of Project Euler exercise 21.
Test 6
A count of the number of rectangles in a grid of size (100, 150). A modification of Project Euler exercise 85.
Test 7
A calculation of the sum of all primes up to 10,000,000, using the Sieve of Eratosthenes algorithm.
As quick partial examples, here is the Mint script code for Test 3:
var a = 1;
for (var i = 0; i < 100000000; i += 1)
{
a = (i + i + 3 * 2 + i + 1 - 0.42) / a;
}
print a;
here is the Lua version of Test 3:
local a = 1
for i = 0,100000000-1
do
a = (i + i + 3 * 2 + i + 1 - 0.42) / a;
end
print (a)
here is the Python 3 version:
a = 1
for i in range(0, 100000000):
a = (i + i + 3 * 2 + i + 1 - 0.42) / a
print(a)
and here is the Ruby version:
a = 1
0.upto 100000000-1 do |i|
a = (i + i + 3 * 2 + i + 1 - 0.42) / a
end
print a
print "\n"
These are the results, showing average execution time for each test for all interpreter language VMs (smaller values are better):
Lua has a very good showing (largely I think because it’s a register-based VM instead of a stack-based one), and I’d expect the non-JIT version of LuaJIT which is heavily-optimised on x86-x64 would be even faster.
Mint just wins in Tests 6 and 7, and is second fastest in the remaining tests, which isn’t bad as far as I’m concerned. There’s more room for optimisation - especially with regards to the Garbage Collector which these benchmark tests purposefully didn’t exercise, but also in other areas, i.e. Constant Folding is on my list to look at implementing - but I’m happy enough with the improvements and speed for the moment.
This is another comparison of C++ compiler benchmarks on Linux using my Imagine renderer as the benchmark, almost three years since I did the last set of benchmarks.
This time, I’m only comparing versions of GCC and Clang, but I am also comparing the -Os optimisation level in addition to -O2 and -O3.
As with the previous benchmarks I did, I’m sticking with just comparing the standard “stock” optimisation levels, as it’s generally the starting point for compiler flags, and it makes things a fair bit easier, rather than trying every single combination of flags different compilers can support.
As it stands now, Imagine consists of 143,682 lines of C++ in 458 implementation files (.cpp), and 68,937 lines of C++ in 579 header files, for a total of 212,619 lines of code.
The compilers that I’m comparing are:
GCC 4.8.5
GCC 4.9.3
GCC 5.4
GCC 6.3
GCC 7.1
Clang 3.8
Clang 3.9
Clang 4.0
Clang 5.0
GCC 4.8.5, GCC 5.4 and Clang 3.8 were Ubuntu packages, the other versions I compiled from source, using the methods recommended in the respective documentation.
The machine the tests were run on is the same machine the previous benchmarks were run on, but it now has an SSD system disk (which I ran the tests on in terms of target compilation), and a more up-to-date Linux distribution (Ubuntu 16.04 LTS). The machine is a dual socket Intel Xeon E5-2643 (3.3 Ghz) of Sandy Bridge vintage. Imagine’s code has also changed quite a bit in key areas, so these tests can’t be directly compared to the previous tests.
This time I didn’t run any microbenchmarks, just three different renders of different things in Imagine, basically rendering three different scenes. Due to the amount of things Imagine will be doing (ray tracing, light transport, material evaluation, splatting, etc, etc) this does mean that there’s a fair chance that code generated for different aspects can’t really be identified, as the timing will be for the render as a whole, but I think it still provides some indication as to what the compilers are doing relative to each other.
First of all I compared compilation time of all the compilers, building all of Imagine using different numbers of jobs (threads), from 16 (the total number of logical cores / threads my machine supports), down to 2. This was to try and isolate how parallel compilation can be (in particular with hyperthreading) when disk IO is a factor. Imagine’s source code was on an SSD, as was the directory for compiling.
Three runs from clean were done with each combination, and the time was timed with the command line ‘time’ command in front of the ‘make -jx’ command.
The graph below shows the results (mean averages).
As can be seen, there’s a fairly obvious pattern of O3 builds taking slightly longer than O2 builds, and Os builds taking slightly less than O2 builds as one would expect. In GCC, going from 8 to 16 threads (so effectively using hyperthreading on the machine, although it’s not clear what the scheduler was doing) gave practically no benefit in the older GCC versions, with a possible tiny benefit with 6.3 and 7.1, although 6.3 and 7.1 take noticeably longer to compile than older versions.
Thread scalability after that is relatively close to linear, the difference probably being link time which cannot be parallelised as much.
Clang is consistently slower than GCC to build. I saw this in my previous tests I ran almost three years ago, and while in those tests I incorrectly enabled asserts when building it from source, making Clang builds slightly slower, even when disabling asserts back then it was still slower than GCC. This time I made sure asserts weren’t enabled, and it still seems to be slower than GCC, which seems to be against conventional wisdom, however it seems pretty consistent here. 5/6 years ago, I definitely found Clang faster to compile than GCC (4.2/4.4) when I benchmarked it, but that no longer seems to be the case.
Executable Size:
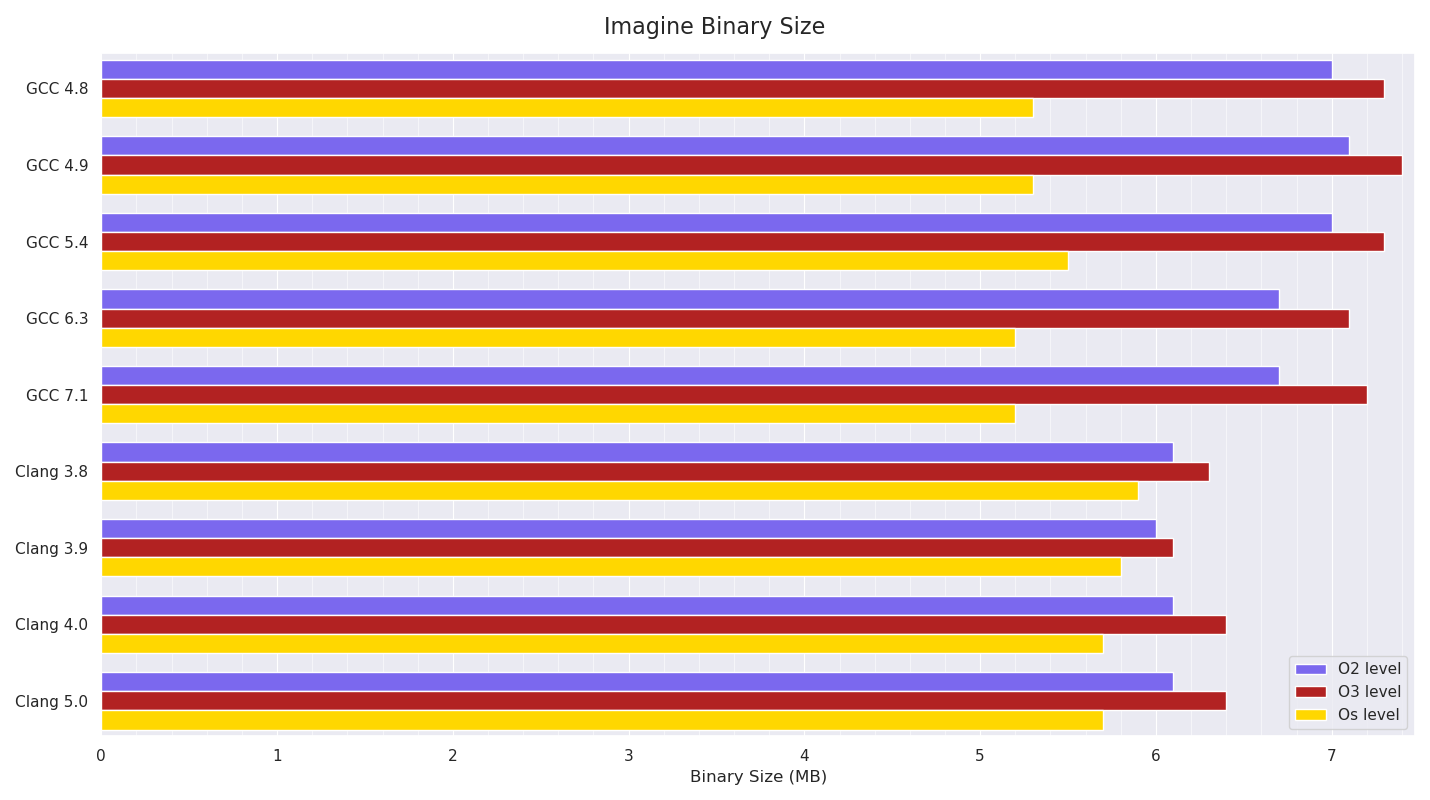
Below is a graph of the resultant executable size:
The pattern of O3 builds being bigger than O2 builds due to more aggressive optimisations (probably mainly more inlining and loop unrolling) is visible, and it’s noticeable how much smaller than O2 builds GCC’s Os builds are compared to Clang’s.
Rendering benchmarks
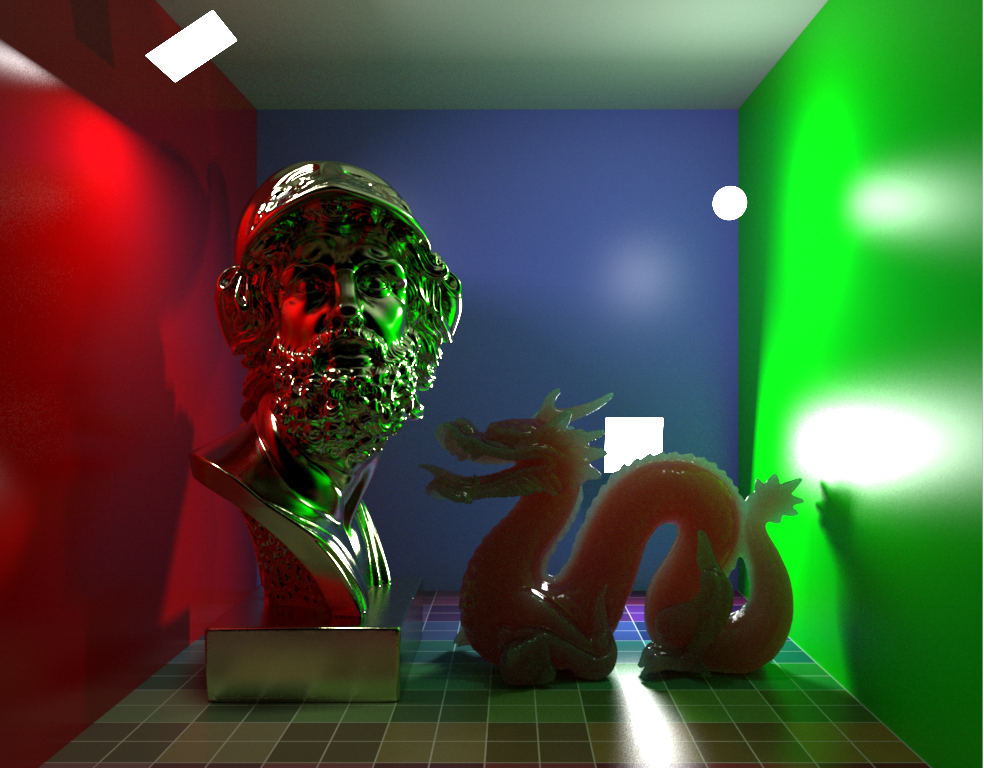
Scene 1:
Scene 1 consisted of a Cornell box (floor diffuse procedural texture with Beckmann microfacet spec lobe, walls diffuse + Beckmann microfacet spec lobes), with one bust model consisting of 544k triangles with a conductor microfacet BSDF (GGX), a dragon model consisting of 535k triangles with dielectric refractive lobe with brute force internal scattering for SSS with multiple scattering, and Beckmann microfacet dielectric lobe.
Three area lights (two quads, one sphere) were in the scene, each of which was sampled per hit / scatter (for next event estimation).
The resolution was 1024x768, with max path length of 6, using a volumetric integrator (which calculates full transmission for shadows, so it can’t early out in most cases), in non-progressive mode, using 144 stratified samples per pixel in basic pathtracing mode (no splitting) with MIS. The Mitchell-Netravali pixel filter was used for splatting.
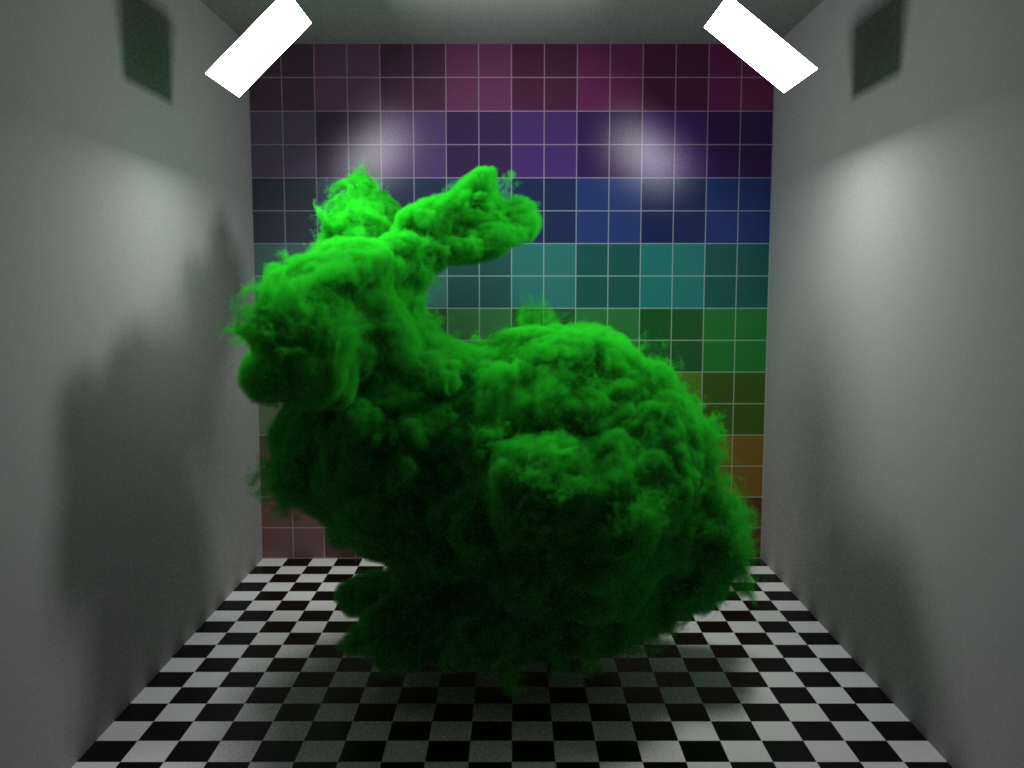
Scene 2:
Scene 2 again consisted of a Cornell box, but with more basic materials (only the back wall had a spec lobe on in addition to diffuse), with two quad area lights, and a dense voxel grid volumetric bunny (converted from OpenVDB examples) with an Isotropic phase function. The resolution was again 1024x768, with max path length of 6, with 81 stratified samples used in non-progressive mode.
The volumetric integrator was used, with Woodcock tracking volume sampling for the heterogenous voxel volume, with multiple scattering, and two transmittance samples per volume scatter event per light sample. Both lights were sampled per surface and volume scatter event for next event estimation. Volume roughening (falling back to nearest neighbour voxel lookup after ray roughness / throughput reaches a threshold) was turned off, so full trilinear voxel lookups were always done.
Scene 3:
Scene 3 consisted of a single 10M triangle mesh of a scanned church ornament, with a diffuse texture provided by a 1M point pointcloud lookup texture (KDTree).
A very large filter radius was needed on the point lookups, due to the weird arrangements of the colour point values in the pointcloud in order to not have gaps in the resulting texture. A constant Beckmann spec lobe was also on the material.
A single Physical Sky Environment light was in the scene, with Environment Directional culling (culling directions on the Environment light that aren’t actually visible from the surface normal) disabled.
The resolution was 1024x768, max path length was 5, and a non-volumetric integrator was used this time, meaning occlusion ray traversal could early-out instead of having to find the closest hit and test transmittance through materials as the volume tests above had to. 81 stratified samples per pixel were used in non-progressive mode, with MIS path tracing.
Performance Results
Six runs of each were done, restarting each time to account for possible different memory layouts - Imagine is NUMA aware where possible, trying very hard to allocate and write (first touch) memory dedicated to the core/socket that will be running, but some things like triangles / geometry / acceleration structures can’t really be made NUMA-aware without duplicating memory which doesn’t really make sense, so it’s somewhat down to luck where memory will be (in terms of attached to which socket). 16 threads were used for rendering, and render thread affinity was set. The times are in seconds, and are for pure rendering (no loading, scene building or acceleration structure building included in the times), and were measured with code within Imagine.
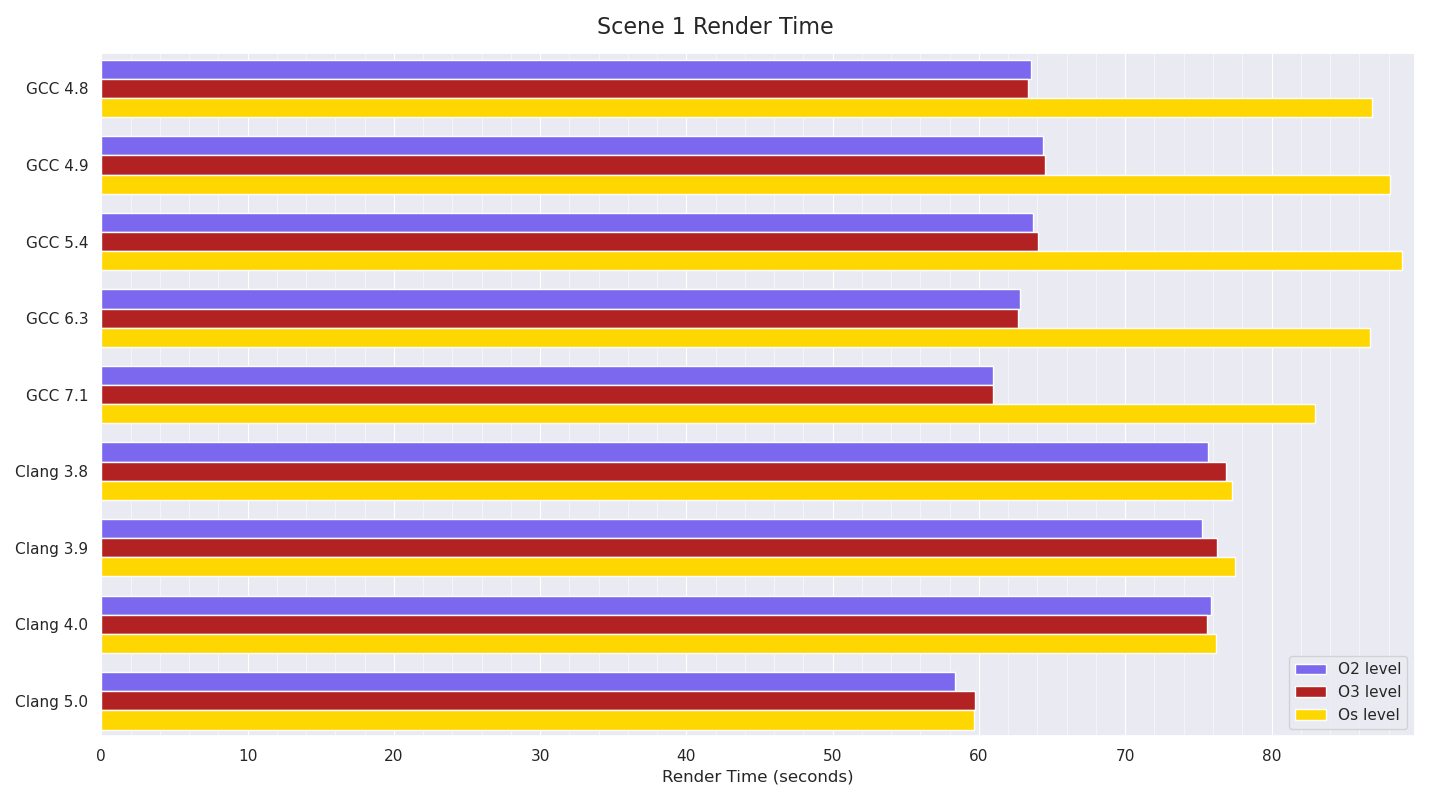
Mean averages are graphed below.
Scene 1
Scene 1 results show GCC 7.1 made some improvements over previous GCC versions, and that GCC’s Os builds are noticeably slower than its O2 or O3 ones. Until Clang 5.0, Clang was noticeably slower than GCC, however Clang 5.0 managed to just beat GCC 7.1’s numbers. Interestingly, Clang’s Os numbers show almost no difference to its more optimised builds, in contrast to GCC’s ratio between the optimisation levels.
Scene 2
Scene 2 shows a regression in performance going from GCC 4.9 to 5.4, which still hasn’t been recovered in GCC 7.1. Clang wins these by a comfortable margin.
Again, Clang’s consistency between different optimisation levels is very close, in contrast to GCC’s, which is more pronounced.
Scene 3
Scene 3 is fairly similar to Scene 1 in that GCC 7.1 makes slight gains over previous GCC versions (and is the fastest), while until Clang 5.0, Clang was noticeably slower than GCC. Clang 5.0 almost makes up the gap to GCC 7.1.
Conclusion
Given these benchmarks are pretty much “overall” benchmarks, given within each test Imagine is doing so many different things, it’s very likely things are averaging out between the compilers,
however, it does seem that Clang 5.0 made significant improvements over Clang 4.0 in two of the tests, becoming the new fastest in Scene 1 and almost matching GCC 7.1 in Scene 3. GCC 7.1 is the fastest in Scene 3, and almost the fastest in Scene 1, but GCC’s speed regression from 4.9 -> 5.4 in Scene 2 still impacts GCC 7.1, meaning Clang completely dominated Scene 2.
What was very interesting to me was the speed penalty GCC’s Os builds have compared to Clang’s Os builds. Given the executable size graph shows a similar ratio in terms of GCC’s Os builds being noticeably smaller than GCC’s O2 builds than Clang’s Os builds are than Clang’s O2 builds, it seems fairly obvious from the executable sizes produced that Clang is still fairly aggressively optimising Os builds, in contrast to GCC which seems to much more strongly prioritise smaller executable size.
Recently, I had been about to upgrade my Linux distro on my main workstation at home, and this brought an upgrade to GCC 4.8 from 4.7 as the base GCC version. Before I upgraded the distro I tried building Imagine with 4.8.3 built from source, and needed to fix some template code as g++ 4.8+ (ICC has never liked it either) now doesn’t like using pure abstract classes as a template type. I made this change to the code, and did some quick approximate benchmarks between 4.7.3 and 4.8.3 which showed there wasn’t really any improvement, so I decided to try 4.9.2 which had just been released. This seemed to showed a fairly serious regression in terms of speed (speed being a pretty important aspect for a renderer), so I decided I’d do a more comprehensive comparison of the latest main compilers for the Linux platform, as back in 2011 and 2012 I used to do compiler benchmarks (GCC, Clang and ICC) regularly every six months or so on my own code (including Imagine), and on the commercial VFX compositor made by the company I worked for at the time, and it had been a while since I’d compared them myself.
I’ve never really liked just doing micro-benchmarks/synthetic benchmarks of just loops, etc of simple code, as they can paint a distorted picture of what’s going on, which can’t always be realised when the same code is put in context within other code - a good example of this is C++ virtual function overhead, which I’ve previously benchmarked, and while it’s possible to see overheads in micro-benchmarks, the same code within an actual real application shows no issues (at least in my particular usage of them) - so I always try to benchmark code doing what it was designed for from a user’s perspective: in Imagine’s case, this is rendering, or aspects related to that.
As it stands now, Imagine consists of over 164,000 lines of C++ code (including comments) in 386 .cpp files and 484 .h files, included heavily (more-so than I’d like, as it causes pretty severe final binary code bloat) templated code for everything from the acceleration structures, image texture / filtering infrastructure to geometry attribute / indices / triangle type code and a fair amount of SSE intrinsics usage for some of the acceleration structures, image filtering, procedural noise textures and triangle packet intersection code. The rest of the code is standard 2003 C++ - GCC 4.1.2 is still used heavily in the VFX industry (due to plugin ABI compatibility issues), so I still want to be able to build Imagine with this compiler if need be. Other than (optional) image library libs (OpenEXR, libpng, libtiff, libjpeg) for file readers/writers, there are no other requirements/dependencies Imagine needs to build.
The compilers I eventually benchmarked were: GCC 4.7.3, GCC 4.8.3, GCC 4.9.2, Clang 3.6 (prerelease from SVN - with -enable-optimized configure option) and Intel ICC 15.0 trial. I did spend several hours trying to get GCC 5.0 prerelease built from SVN, but gave up after I couldn’t get it to accept either my system zlib installation or a custom one I built from source - googling seemed to indicate this was a multilib compatibility issue and I could get around it by symlinking include and lib directories for various things, but doing that didn’t work for me. I also wanted to compare earlier GCC versions, but couldn’t get 4.6 or 4.4 to build from source on my system either - again, seemingly due to multilib issues.
Comparing compilers fairly is a difficult thing to do as they all have different abilities in terms of optimisations, and even for the built-in standard -O1/-O2/-O3 optimisation types, they do different things for these. However, given the huge amount of different options they have controlling things like inlining aggressiveness and limits, loop unrolling, vectorisation, etc, it would be vastly time consuming to try every compiler option progressively to try and find the best combination for that version of compiler, although that would be the fairest test in terms of benchmarking the fastest code a particular compiler can produce for a specific set of limitations (instruction support, etc). For this reason, I’m going to stick to just comparing each compiler with both -O2 and -O3 with SSE4 support, as these are generally the starting points for using the compiler.
I decided to run three different rendering tests, each one testing slightly different features of Imagine, although there would obviously be a lot of overlap between the tests, and then two synthetic tests: one of image mipmap creation and the other of procedural noise evaluation.
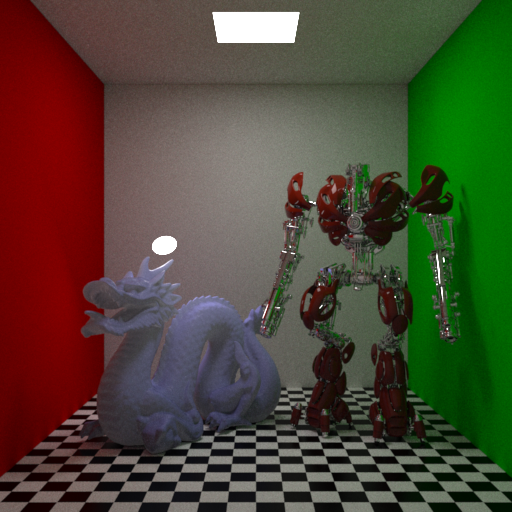
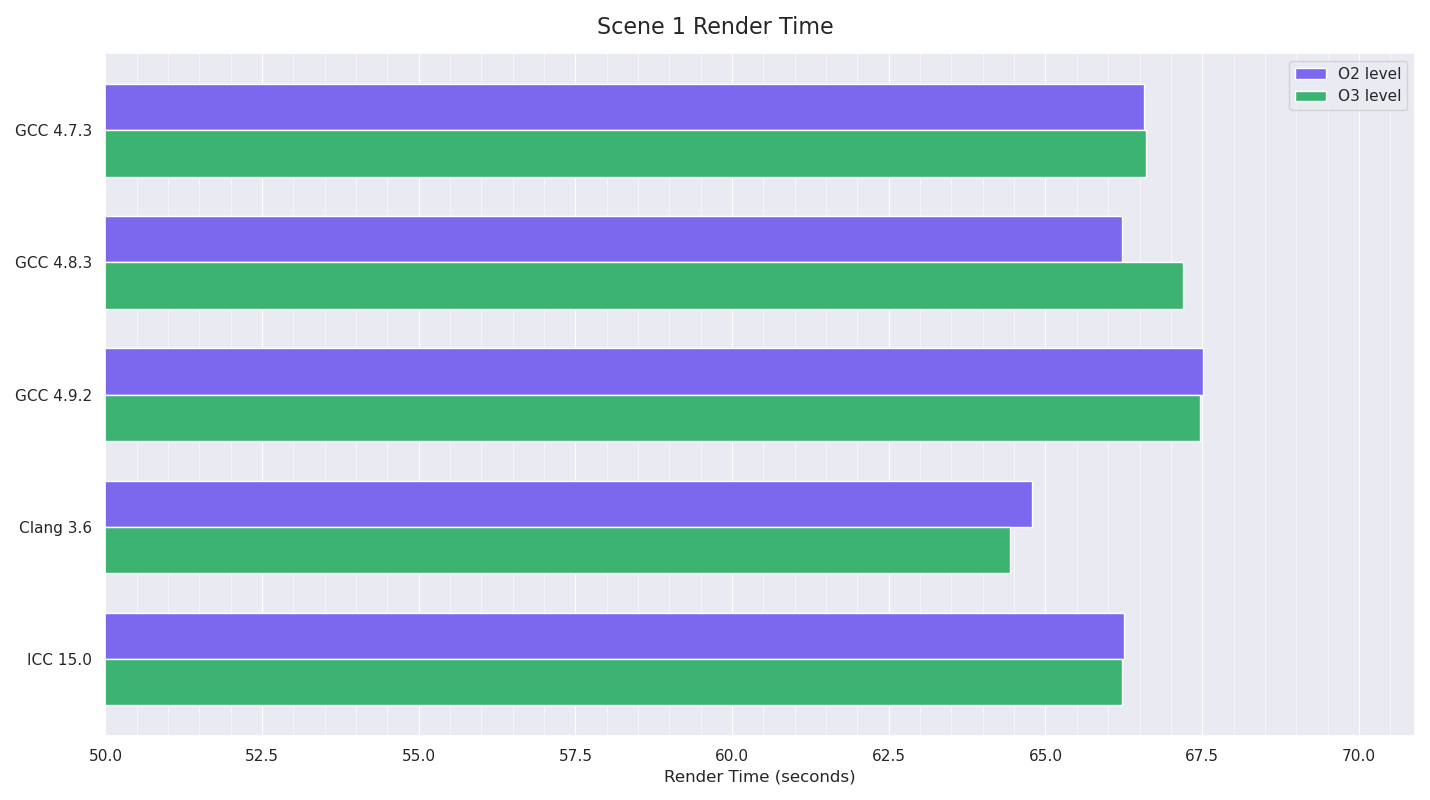
Scene 1 was a fully-enclosed cubic room, but with the front wall plane invisible to camera rays allowing them into the scene. Inside were the Stanford dragon at 1M triangles with a translucent SSS material, and the Katana robot example model with a combination of metal and car paint materials. Two area lights illuminated the scene, a standard ceiling quad and a disc light behind the dragon. This test made use of brute-force multiple-scattering volumetric integration for the SSS, with uni-directional path tracing with MIS, with two light samples taken per direct lighting evaluation. A total of 5 ray bounces were allowed, with a limit for diffuse and glossy of 4, and 5 for reflection rays.
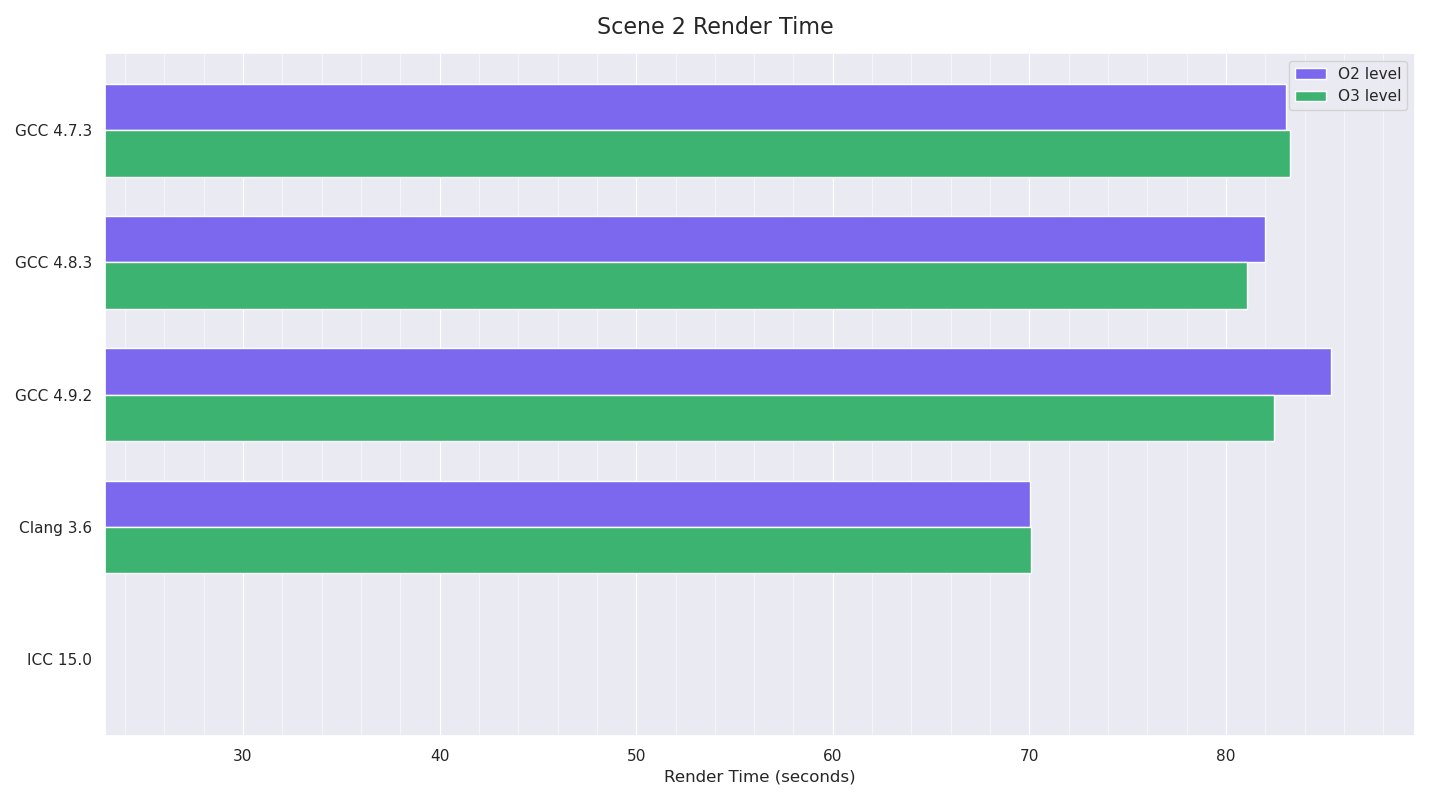
Scene 2 consisted of a large plane with a highly anisotropic metal material with a simple toy train model with diffuse, specular and bump textures and Cook-Torrance-style materials.
There was also a volume primitive backed by dense voxel grids for density and temperature with a (pretty poor) blackbody shader for the emission colour based on the temperature. Trilinear interpolation was used to lookup voxel values. The last object was a toy helicopter with metal and plastic materials, with the rotors animated and quaternion interpolation used for motion blur. An HDR environment light was used. Brute-force multiple-scattering was enabled for the volumetric integration.
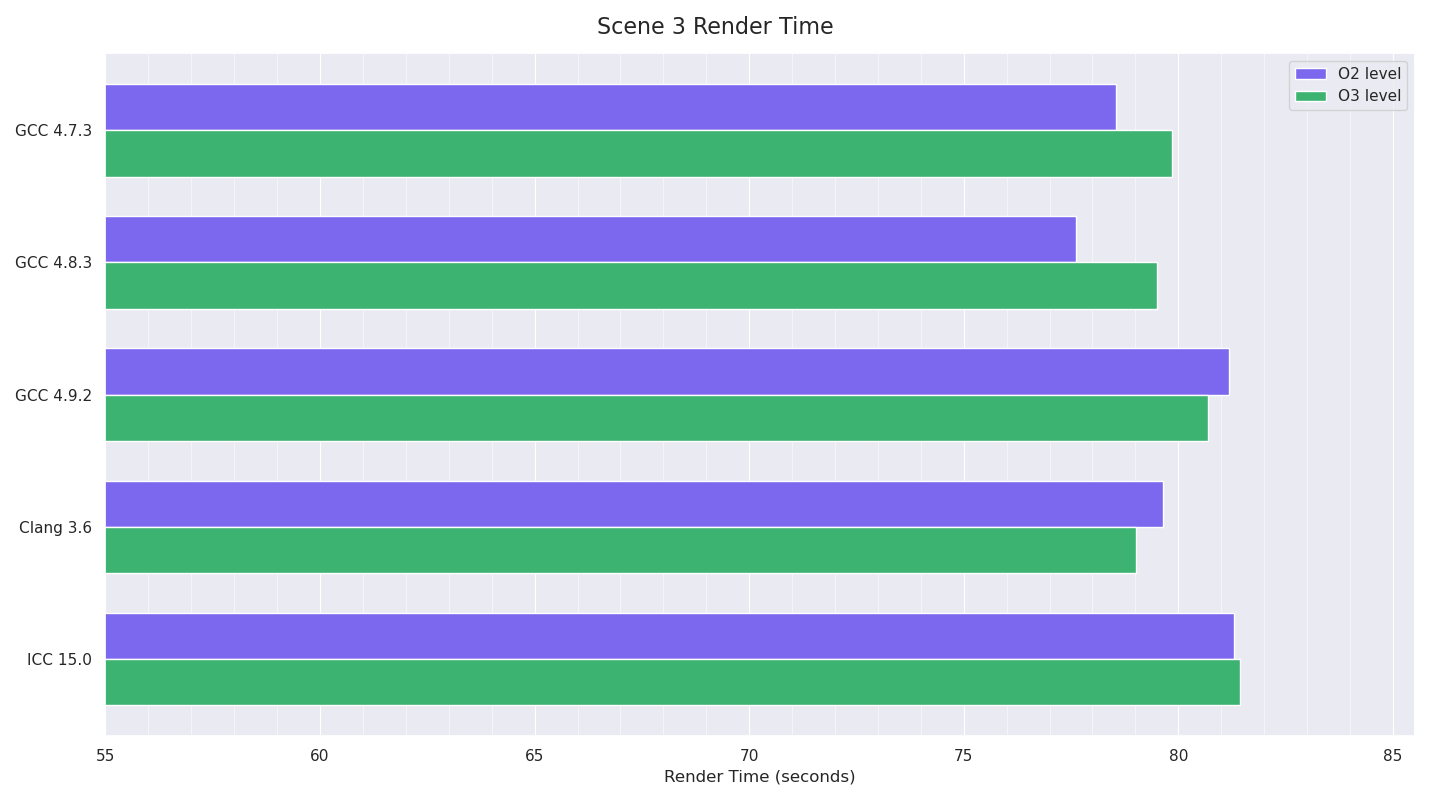
Scene 3 was an extremely large plane with reflective surface and a procedural bump texture, with an island mesh with 165,000 instanced trees on it. The trees had diffuse textures on the trunks as well as procedural bump textures (simplex noise), and the leaves were constant diffuse+backlit+CookTorrance spec, with an alpha texture for cut-outs (using stochastic presence sampling for all ray types). An HDR environment light was used. This was rendered as a Deep Image (alpha), so the integrator needed to do extra work collating and possibly merging each pixel sample for each pixel.
I configured Imagine to use completely deterministic sampling (the random numbers used to generate samples were consistent between runs per thread), and all textures were pre-loaded in memory before starting the renders. Similarly geometry processing and acceleration structure building was done before starting the timers, meaning these rendering tests should be completely deterministic in terms of calculations and would only be memory / CPU bound, essentially testing raytracing intersection, light integration, texture lookups, procedural texture evaluation, etc.
-O<n> -fPIC -fp-model fast -msse4 -no-intel-extensions
(plus some experimental tests I later did with: -O3 -no-prec-div -fp-model fast=2 -xHost -inline-level=2).
My system was a dual-socket Xeon quad (E5-2643), with eight physical cores - 16 threads with hyperthreading (which I made use of for the rendering tests). Linux Kernel version was 3.5.
Timings are mean averages over multiple runs, with the system idle and making sure all CPU core temps were under 45 degC to not bias things by allowing turboboost being used differently between runs.
Results
I did some quick compile timing tests (all using eight jobs only to make sure the build wasn’t IO constrained). Three runs of each from a completely clean build, other than for ICC which kept having FlexLM license errors, so I only had the patience to do two runs for ICC. Mean averages are shown.
To my surprise, Clang was slowest: generally I’d previously found that Clang was much faster at compile time than the other compilers, and other recent benchmarks seem to show that picture as well. Running single-threaded builds of Clang and GCC 4.7 showed similar results: 6 minutes 18 secs and 4 minutes 49 seconds respectively, so I’m not sure what happened here.
(Later Edit: it turned out I had built Clang with asserts enabled, which meant it was doing extra work, and meant the timing numbers for Clang for compile times using it were inaccurate, but all other results here are valid from the build).
For the three render scene tests, Imagine was started, pre-renders were done, I ensured all the CPU core temps were under 45 degC and the system was idle, and then I rendered the scene. Rendering was done with 16 threads (using full hyperthreading of the machine), and each thread had its affinity tied to a unique CPU id (using pthread_setaffinity_np()), hopefully meaning there was less scope for the scheduler to bounce threads around different cores leading to cache misses (in the past I’ve noticed more than measurable speed improvements by doing this especially when the machine has multiple CPU sockets). Timing for just the rendering stage was printed to the console. I ran each test separately, restarting Imagine and doing the pre-renders each time (meaning memory for the images, geometry and acceleration structures would very probably be allocated in different places each time).
I did at least four tests with each compiler / optimisation level combination, often doing more when the variance between the numbers looked odd or too large. I saved the render output of two of each combination for checking later (to ensure they’d rendered the correct thing and to compare final output values).
The tests for Scene 1 had Clang as the winner by a fair margin, with GCC 4.9 very slightly slower than the previous GCC versions. Only in Clang’s case was the O3 build noticeably faster than the O2 one.
The tests for Scene 2 also seemed to have Clang as the clear winner, although I couldn’t run the Intel ICC tests as there were severe issues with the acceleration structure build code which only triggered in this test (code branches were being taken that shouldn’t have been possible). For the moment I’m putting this down to an ICC bug (given past experience with ICC, unfortunately it is pretty buggy) as marking a uint32_t class member variable as volatile “fixed” the issue, but it definitely seemed that ICC was emitting code that would not copy across all the bits of a uint32_t and so was truncating it, leaving some bits uninitialised. This code was only running when motion-blur was being used for an object (the helicopter’s blades in this case) - basically a special type of primitive clipping that works well with motion blur bounds. I added debug code to verify that none of the other compiler builds were doing things wrong in that place, and as I didn’t want to test ICC with this volatile modification which shouldn’t have been needed, I just skipped it.
GCC 4.9’s results however, showed that the timings were pretty inconsistent: ranging from 88.43 seconds to 82.39. I couldn’t find any pattern to this: the system was idle, CPU temp was down before starting, output results for all the different compilers matched almost exactly (the fast math option was enabled for all compilers, meaning the compilers weren’t required to always stick to IEEE float precision, and thus there were minor variations in the results of some of their calculations, but the differences of the final render outputs were extremely minor), until I discovered that doing successive renders with the GCC 4.9 builds with the same pre-render state gave much more consistent results. Given that all the builds were doing almost exactly the same thing (very minor floating point value differences as pointed out above), this pointed to data memory layout differences causing this, possibly even due to memory alignment issues, but more likely due to differing memory layouts of things like acceleration structure nodes, geometry, etc affecting memory pre-fetching or branch prediction in some way due to the code GCC 4.9 was generating. None of the other compilers showed this issue. The only other difference with the GCC 4.9 tests was that I had to set LD_LIBRARY_PATH to point to the GCC 4.9.2 install’s lib64 directory for a newer version of libstdc++.so.6 in order to run these builds. However I don’t think this was the cause of these timing inconsistencies as I tried running some of the other compiler executables with this modified LD_LIBRARY_PATH (and verified using LD_DEBUG=files output that this newer lib was being used), and the other compiler builds I tested still didn’t exhibit this issue.
Scene 3’s tests are a much more mixed bag with no outright winner, although the O2 builds of GCC 4.7 and 4.8 were the quickest. Again, GCC 4.9 showed varying results, and as before, using the same pre-render state and doing consecutive renders gave much more consistent results (which I didn’t include in these results).
Due to the fact these rendering tests were testing quite a lot of different things at once, and I was slightly concerned about the fact that the ICC builds couldn’t run Scene 2’s test, as well as the fact that ICC wasn’t winning any of the tests (when I last benchmarked the compilers over two years ago, ICC was consistently > 25% faster than the other compilers), I decided to turn my attention to more simple synthetic tests.
For the two synthetic tests, I stubbed Imagine infrastructure code into much smaller separate executables, with code just running in the main thread (still with affinity set).
The Mipmap test involved opening 6 8K 16-bit half RGB scanline OpenEXR files from disk, keeping them in memory (at full 32-bit float precision after conversion) and repeatedly generating filtered mipmaps for these images, 11 times each in rotation (so effectively doing 66 mipmap generations).
I only started timing after the images were loaded off disk and converted to 32-bit float format, so the benchmark should be CPU and memory constrained only (quite a few memory allocations).
In this test Clang and ICC lagged GCC significantly, with GCC 4.9’s O2 benchmark strangely slower than the other GCC timings.
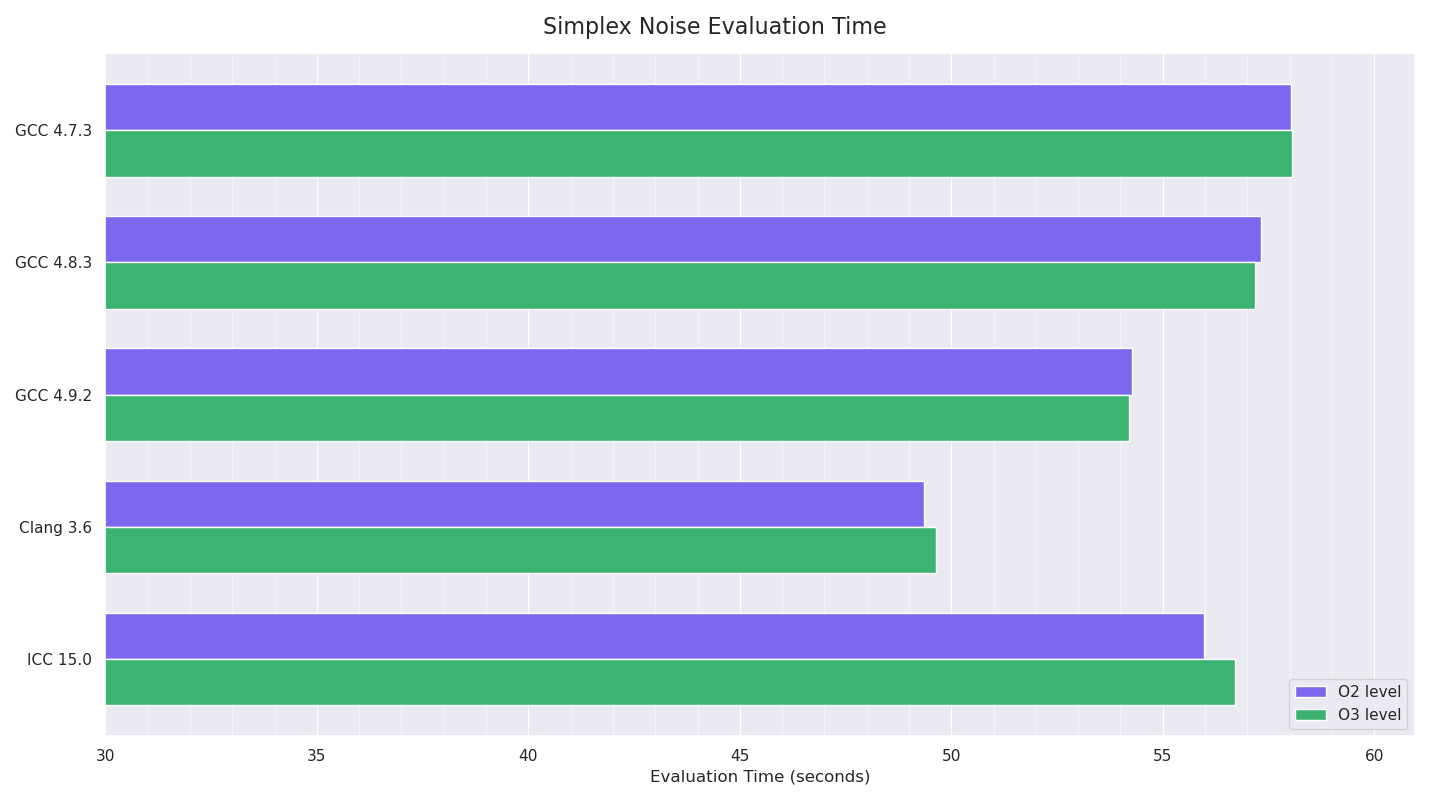
The procedural noise test involved iteratively evaluating 3D simplex noise at regular intervals at positions in the shape of a cube (stepping in each dimension), for a total of 1,194,389,981 evaluations.
I disabled the SSE intrinsics support I had for this code, so it was just pure float / int operations and branching, to see what the compilers could do. This test should be fully CPU-constrained.
Clang won this test by a fair margin, with GCC 4.9 next fastest and ICC followed. I was still really confused by ICC’s poor showing, and started experimenting with more aggressive compiler options: -O3 -no-prec-div -fp-model fast=2 -xHost -inline-level=2
allowing less precision, using all instruction sets the host processor supported and more aggressive inlining at the compiler’s discretion. Doing this knocked a few seconds off the timings for ICC, but I’m almost certain (but didn’t test) doing equivalent things for the other compilers would have done like-wise.
Two years ago, libm’s maths functions (definitely transcendentals like pow(), sin(), etc) were pretty bad in CentOS 4/5 (often to the point that using double precision was significantly faster than the standard float versions), so using ICC meant that it had the ability to replace these functions with Intel’s own optimised ones (which at the time were much faster than libm’s) and statically link them inside the executable. Analysing the symbols in the built executables for ICC and the other compilers showed ICC 15.0 was doing this: most maths symbols for the non-Intel builds were Undefined, with them pointing to GLIBC, whereas ICC’s builds had the symbols in the executable.
So I can only conclude that either GCC and Clang have become much faster over the past couple of years, or libm’s maths functions are a lot faster than they used to be. Both of which I think are probably the case.
I’ll need to do some profiling to work out what’s causing the GCC 4.9 builds to be so inconsistent, as that appears to be why when I first benchmarked with GCC 4.9 it seemed slower.
This isn’t the most comprehensive C++ benchmark, but I think it’s a pretty fair comparison given that the compilers were all limited to a relatively similar degree - while the different compilers do different things at their respective O2/O3 levels, they have the same intent in that they’re recommended starting points, and O3 might be too aggressive in some cases - and taking into account how time-consuming it would be to play around with all the different optimisation flags for the different compilers. I would though have liked to have got GCC 5.0 built from SVN and to also compare the compilers with whole program optimisation, link time optimisation and profile guided optimisation, and to see what benefits those options might have brought over the more standard optimisations.
I’ve been meaning to do some benchmarks on KDTree building / rendering for some time, given that although I’ve arrived at a set of build criteria which generally give the best intersection performance, I’d never actually done comparisons of the pros/cons of the different variables when building KDTrees and their cost/benefit ratio regarding intersection performance, and had never seen any published comprehensive benchmarks of KDTrees which tested more than one or two variables at a time. I’m also unlikely to play around with KDTrees much more, as I have to some degree moved over to using SSE-optimised BVH acceleration structures which generally provide slightly better render times, but orders-of-magnitude faster build time, thanks to standard binning.
Caveats: First of all, these tests are of my implementation of a KDTree. In certain configurations, it’s very close to PBRT’s reference implementation, but I’ve optimised the traversal code to reduce branching, and added “Perfect Split” clipping and min/max binning approximation as options while building. I’ve also added inverse hashed mailboxing to ray intersection. However, there’s no guarantees as to the correctness of my implementation, although in testing against other renderers which use KDTrees, it seems highly competitive, and is definitely faster than PBRT’s implementation - ~2x faster with an Empty Bonus of 0.9, clipping and using inverse hashed mailboxing.
So while the following results are fairly comprehensive, there’s certain build criteria I didn’t bother testing, and doesn’t in any way test the variable of leaf node threshold size, which I’m pretty certain will have a strong influence on both build time and intersection time. In addition, due to the time it’s taken to accumulate the results, I’ve had to reduce the number of test scenes down to three from the planned six, which also means these tests could be more thorough.
I also recorded acceleration structure size, from which - because I know the KDTree nodes are 8 bytes each - I can work out the number of nodes the resulting KDTree had.
Unfortunately, I didn’t record the breakdown of interior / leaf nodes, which would have been useful. I’m not showing those numbers in these results, but I use them in the results section to analyse some of the timing numbers.
The results of acceleration structure build time are also slightly misleading, although still relevant - I’ve disabled multi-threaded building of the KDTree for a few reasons: first of all, it’s not a completely parallelisable problem, and while it definitely is possible to parrallelise KDTree building to a degree, depending on the criteria used for building the KDTree, different amounts of parallelism are possible. For example using “Greedy” n log n SAH splitting, each thread needs to compile its own copy of the list of edges, and this either requires a lot more memory or if you break the task down into separate chunks a merge-sort stage at the end. It also causes a lot of cache thrashing, generally limiting the scalability of multithreading. So while the build times are not realistic in terms of “wall clock” time (generally I tend to get 3-4x speedup from multithreading the KDTree builds), given that they are consistently single-threaded for all configurations and the render times are consistently completely parallel, it allows a consistent comparison of the cost/benefit ratio for building a KDTree in a particular configuration vs. the render time.
Testing methodology / criteria
The theoretical best way to test ray intersection performance of an acceleration structure tends to be by casting well-distributed rays at the centre of the acceleration structure from a sphere around it, simulating incoherent rays, in such a way that path tracing will produce off diffuse surfaces. However, I’d prefer to keep tests more practical, so I’ve decided to test different meshes by putting them into a fully-enclosed room which has diffuse materials and a single area light and time how long it takes to build the acceleration structure for the main test mesh and render the resulting image. The number of ray bounces for all ray types will be four, and the render resolution and number of samples-per-pixel will be the same for all tests: 1024 x 768 and 128 respectfully.
Instead of baking down all the triangles into one main scene acceleration structure, I’m going to use the two-level acceleration structure hierarchy I use for instancing, such that the scene has an acceleration structure containing all objects, and each object’s geometry instance has an acceleration structure of the triangle mesh. This allows me to only alter the configuration of the central test object’s KDTree, while keeping the other acceleration structures for the walls, floor, etc and scene constant. The acceleration structures for the wall, floor and ceiling will each only have two triangles anyway, so will immediately produce leaf nodes.
For building the acceleration structure, I’m going to test two different methods: min/max binning SAH approximation, and the standard “Greedy” n log n SAH version which PBRT implements. For both methods, I’m going to test always splitting on the largest volume extent axis vs. checking all three available axes. For the “Greedy” method, I’m also going to test the effect the “Empty bonus” value has, and what effect clipping triangles (“Perfect splits”) has.
The only variable that will be tested for rendering itself is enabling/disabling Inverse Hashed mailboxing.
Test Scenes:
I’ll be testing the following three scenes:
Scene 1: Stanford Dragon: 871K triangles, in axis-aligned orientation
Scene 2: Robot: 1.6M triangles, at 45-degree rotation to axis-alignment
Scene 3: XYZ Dragon: 7.2M triangles, axis-aligned orientation
Because of the fact I’m using a two-level hierarchy of acceleration structures, in order to test Scene 2 fairly with regards to the axis alignment rotation, I’ve re-baked out the mesh in world-space with a 45-degree rotation around the Y (up) axis, so that its triangles are rotated within object-space as well.
KDTree leaf node threshold size is always 6, and for min/max binning approximation, when the number of objects left to be split is less than 8192, I switch over to the normal “Greedy” implementation - otherwise, I’ve found that min/max binning does a pretty poor job of splitting at that level. Published papers on the min/max binning algorithm for KDTrees seem to show similar issues.
In terms of recording the specific times, this is being done within the code using gettimeofday() to record the respective start/end times, calculating the difference and convert it to double precision, giving a number in seconds. That number is rounded to 5 decimal places.
For all test configurations, I’ve run six independent tests in a clean state, and the results shown here are the mean average of those results, again rounded to 5 decimal places. For the last two tests of Scene 3, there were differences in time for some of the tests outside the margin of error, so I ran a few more tests for those. The tests were all run on the same computer (Dual Xeon, Sandy Bridge micro-arch), running Linux 3.5 kernel, and all test executables were built with GCC 4.7.1 with the same options. I also tried to ensure that the CPU core temperatures were below 60 degC before running each test.
Test Results / Analysis
Scene 1
Specs
Time (seconds)
All Axes
Build
Render
Render (mailboxing)
No
2.67848
100.58898
71.75651
Yes
3.92627
98.72142
71.91679
With min/max binning approximation, build times are relatively fast (a fair amount of the time is taken up by the “Greedy” partitioning which takes over after 8192 triangles), and surprisingly, while checking all three axes instead of just the single largest extent axis takes longer, it doesn’t take three times as long, which
is what I would have expected. I guess some of the time would be due to memory allocation, which when checking all three axes is only done once.
On the rendering side, the fact that all axes were checked while building seems to have very little effect in this case, indicating that the extra time penalty for building might not always be worth the effort. Enabling Inverse Hashed Mailboxing has a huge effect on render times, effectively reducing the render times to ~73% of their previous times.
Specs
Time (seconds)
All Axes
Empty bonus
Clipping
Build
Render
Render (mailboxing)
No
0.0
No
4.81748
84.54154
63.03533
No
0.5
No
4.88900
83.79326
62.14473
No
0.9
No
7.51690
79.24561
59.32178
Yes
0.5
No
8.11435
86.87896
67.30279
Yes
0.9
No
10.87438
72.90415
56.69851
No
0.9
Yes
14.48284
73.29534
54.64541
Yes
0.9
Yes
25.01317
67.64028
52.54923
With the “Greedy” n log n partitioning method, build times are more expensive, and the “Empty bonus” value, used when building to maximise - or cut away - empty space has a very big effect on both the build time and the render time. Based on the memory allocation numbers I noted, and thus the number of nodes in each KDTree, I can see that having a bigger empty bonus leads to deeper (and therefore bigger) trees, as expected, but also better rendering times. Checking all three axes gives slightly better render times with an Empty Bonus of 0.9, but worse render times with one of 0.5. Triangle clipping is very expensive at build-time in this test, and only provides slight speed improvements at render time.
Although faster to build, the min/max binning approximation cannot generate trees as well as the “Greedy” one, so render times are significantly faster with trees built with the “Greedy” method. Once again, Enabling Inverse Hashed Mailboxing significantly reduces render times across the board.
Scene 2
Specs
Time (seconds)
All Axes
Build
Render
Render (mailboxing)
No
12.36240
170.46582
131.55602
Yes
14.05898
169.83621
131.14230
Min/max binning really struggled with this mesh, not really partitioning the triangles very well, and leading to very large leaf nodes (over 400 triangles in some cases) once the depth limit (35) had been hit. Checking all three axes gave barely detectable improvements at render time.
Again, Enabling Inverse Hashed Mailboxing has the same effect as seen previously.
Specs
Time (seconds)
All Axes
Empty bonus
Clipping
Build
Render
Render (mailboxing)
No
0.0
No
18.18691
133.51584
93.14001
No
0.5
No
18.32624
133.04663
93.46723
No
0.9
No
71.08561
141.30970
98.75770
Yes
0.5
No
24.46969
129.35730
95.41422
Yes
0.9
No
85.27671
131.80109
96.49541
No
0.9
Yes
31.75843
90.94120
70.42518
Yes
0.9
Yes
52.58952
87.22592
63.87435
Once again, with the “Greedy” partitioning method, build times are more expensive, but with this mesh, a more aggressive Empty Bonus value produced deeper trees with no benefit - I think this is down to the fact that the mesh has been rotated at 45 degrees to the axis alignment, leading to non-tight AABBs. This is backed up by the fact that the tests with “Clipping” enabled (which spatially clips triangles to test split criteria as well as clipping a node’s BB to its parent node’s, thus removing overlap) not only build faster despite doing more work, but have significantly reduced render times.
Checking all three axes in the final test with clipping enabled is much more expensive at build time over testing a single axis, but gives a reasonable render time improvement.
Once again, Enabling Inverse Hashed Mailboxing significantly reduces render times across the board.
Scene 3
Specs
Time (seconds)
All Axes
Build
Render
Render (mailboxing)
No
28.78550
142.52660
118.61174
Yes
40.60875
141.60918
117.62730
In this test with min/max binning, checking all three axes has a fairly moderate penalty at build time over checking only one axis and provides a very slight render time improvement. Enabling Inverse Hashed Mailboxing provides a significant render time improvement once again.
Specs
Time (seconds)
All Axes
Empty bonus
Clipping
Build
Render
Render (mailboxing)
No
0.0
No
51.80268
128.99604
105.48060
No
0.5
No
52.92773
128.41903
104.65014
No
0.9
No
71.33298
123.14448
100.40070
Yes
0.5
No
91.35005
138.43419
112.33473
Yes
0.9
No
109.65947
123.00479
100.35440
No
0.9
Yes
112.55201
117.00627
95.81172
Yes
0.9
Yes
209.72551
117.77966
95.89430
The “Greedy” partitioning method takes a significant amount of time to build with this mesh, sometimes taking longer to build than it does to render (although building is single threaded as I’ve disabled multi-threaded building). Except for a strange result with the test with Empty Bonus of 0.5 and checking all axis, which for some reason produced huge trees (based on the number of nodes allocated) but still with large leaf nodes, leading to slow performance, the same general picture appears, although this time the “Empty Bonus” variable has much less of an effect, as does the clipping and checking all axes. This is probably because with this mesh it is axis-aligned in general, and the triangles are extremely small. Based on the build-time penalty for clipping and checking all axes, the pay-off for build-time vs render time in this test doesn’t seem as worth it.
Inverse Hashed Mailboxing once again brings down the render times in all cases.
Conclusion
KDTree building is very expensive, especially with “Greedy” n log n building, but in all cases this generates faster trees for rendering than min/max binning approximation does. The “Empty Bonus” variable seems to have variable results, with more aggressive values giving deeper trees but faster render times for some meshes, but producing worse trees in other cases. With “Perfect Split” clipping enabled, build time is even more expensive, but with meshes that don’t have tight AABBs, seems to be well worth the extra work. Checking all axes doesn’t really seem to provide that much benefit, but with min/max binning, it’s possible to parallelise checking all three axes at once with SSE intrinsics, so the cost/benefit payoff is possibly there, although that’s not possible for KDTree building with the “Greedy” method or when spatially clipping triangles, so standard scalar code needs to be used, increasing the work that needs to be done.
Using Inverse Hashed Mailboxing provides no build-time penalty and significantly reduces render time in all situations.
Future investigation: Given how much better the results of KDTree building are with “Greedy” building, I’d be interested in what benefit using min/max binning over standard binning has with BVH acceleration structures, and whether the huge potential penalty for doing “Greedy” building with BVHs would provide any render time benefits.